ROS学习(一)
ROS学习笔记
ROS初次实践
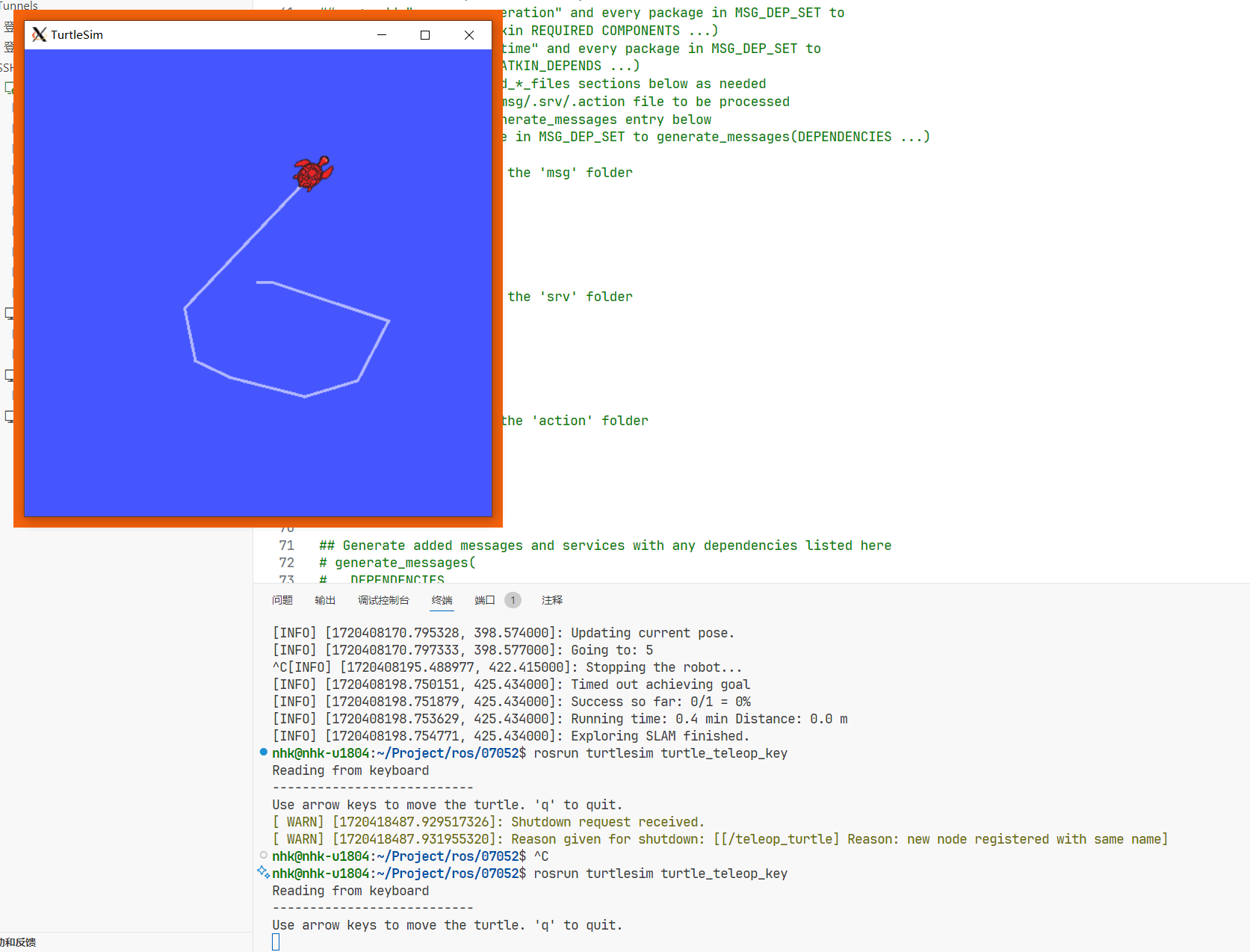
启动ros小海龟
1 | roscore |
创建工作空间
1 | mkdir -p ~/catkin_ws/src |
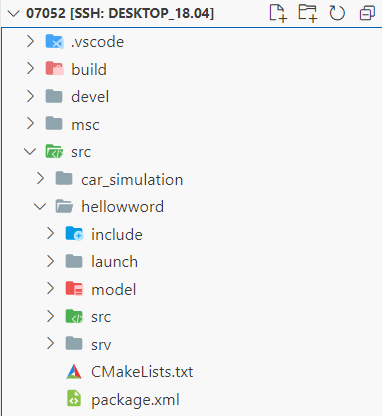
创建功能包
1 | cd ./src |
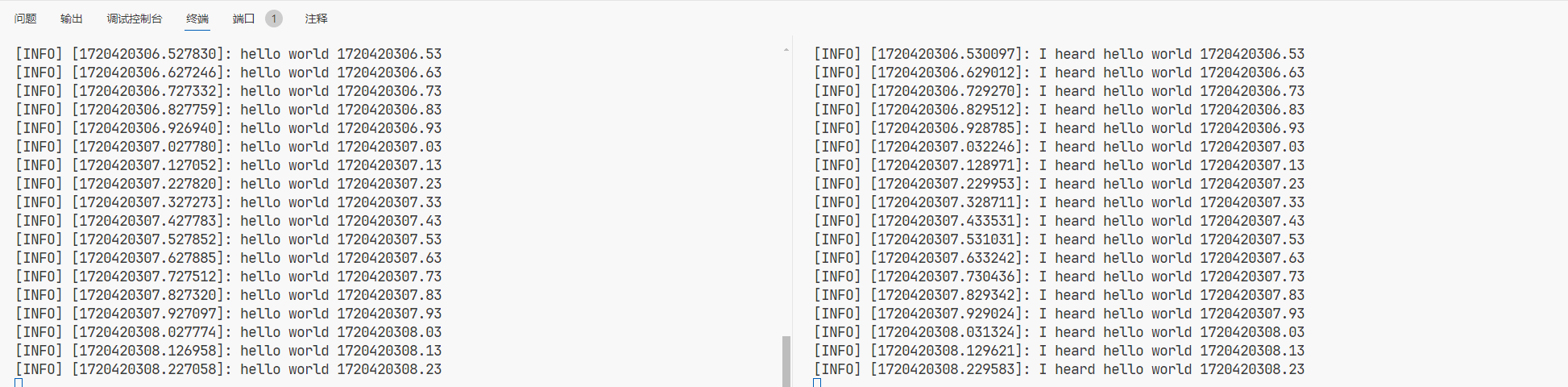
话题编程
1 | pub = rospy.Publisher( 'chatter' ,String, queue size=10) |
服务编程
1 | ros::NodeHandle n; |

动作编程
1 | #客户端 |

关键组件
launch文件
通知启动多个进程,并给其添加执行参数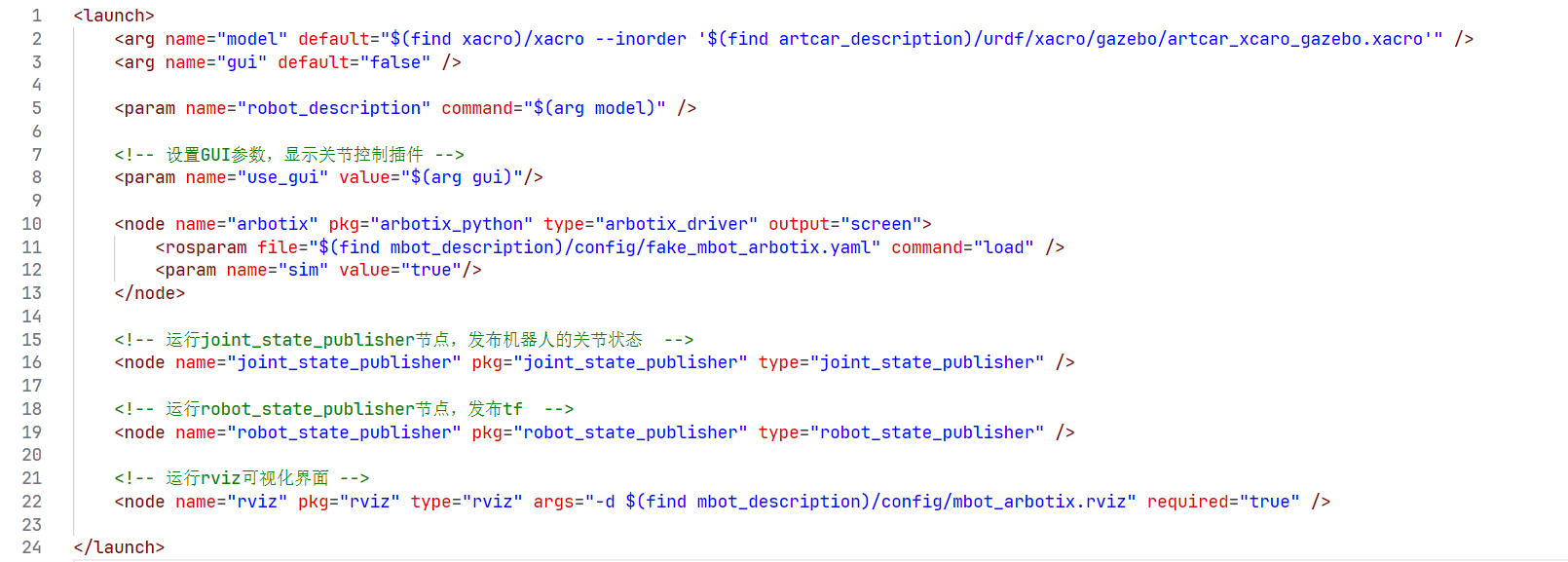
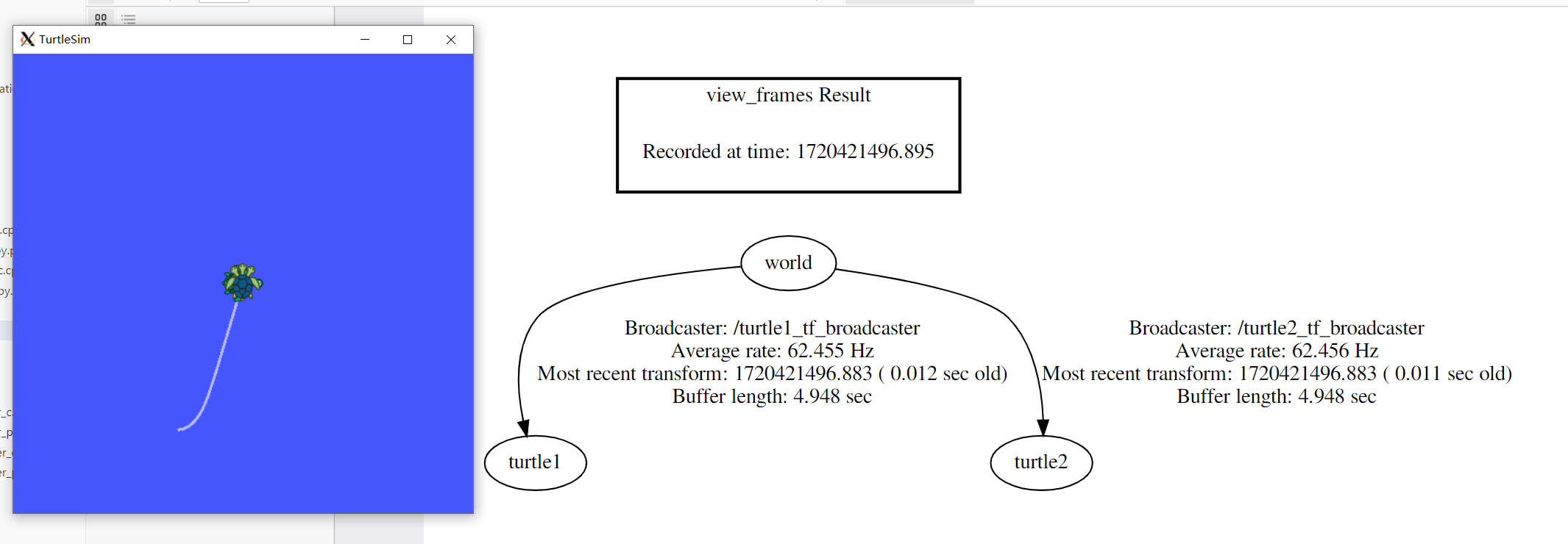
tf坐标变换
1 | roslaunch turtle_tf turtle_tf_demo.launch |
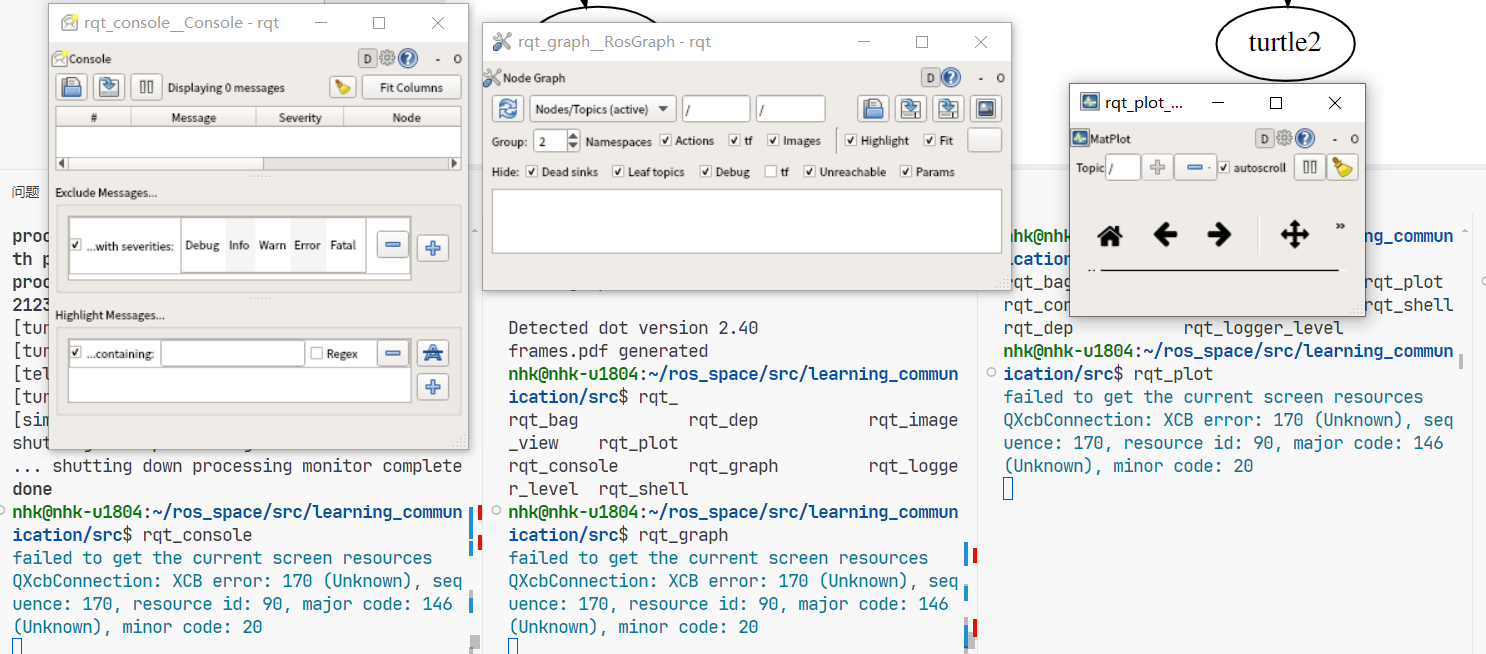
QT工具箱
rviz可视化
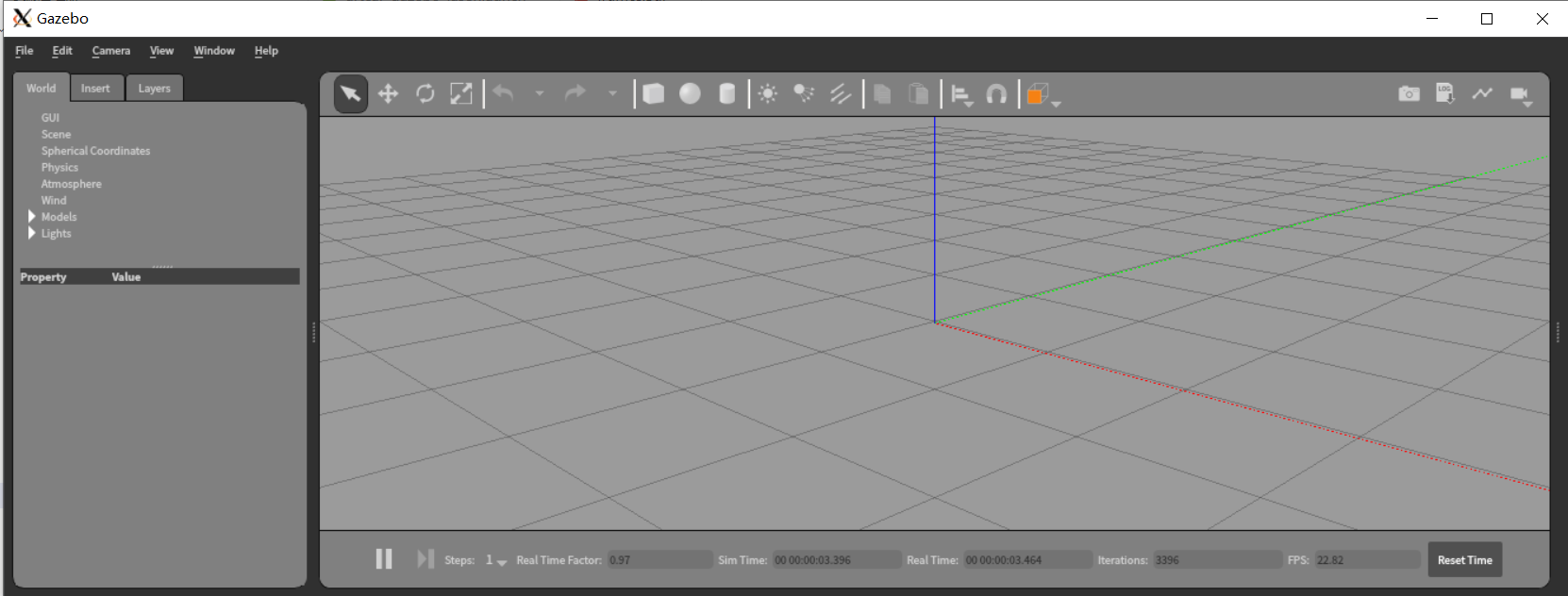
gazebo仿真