ROS学习笔记
机器人构建
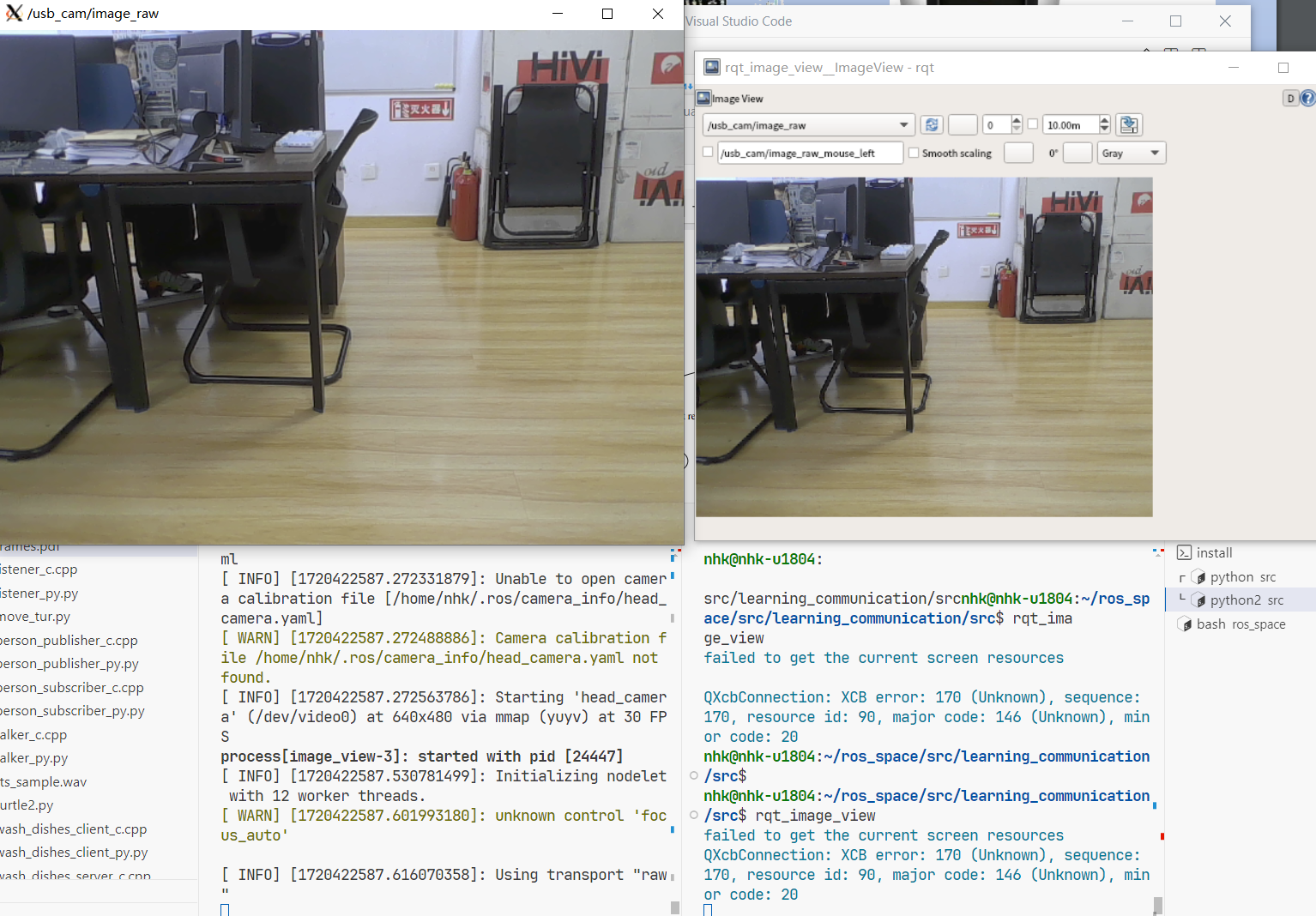
连接摄像头
1
2
| roslaunch usb_cam usb_cam-test.launch
rqt_image_view
|
URDF/xacro建模
xacro建模可以实现部件复用以及文件引用,提高了整齐度,减少了后期模型修改的难度
同时支持宏定义以及函数计算,增加了模型灵活性
这里创建了一个简单车体以及一个激光雷达
机器人仿真
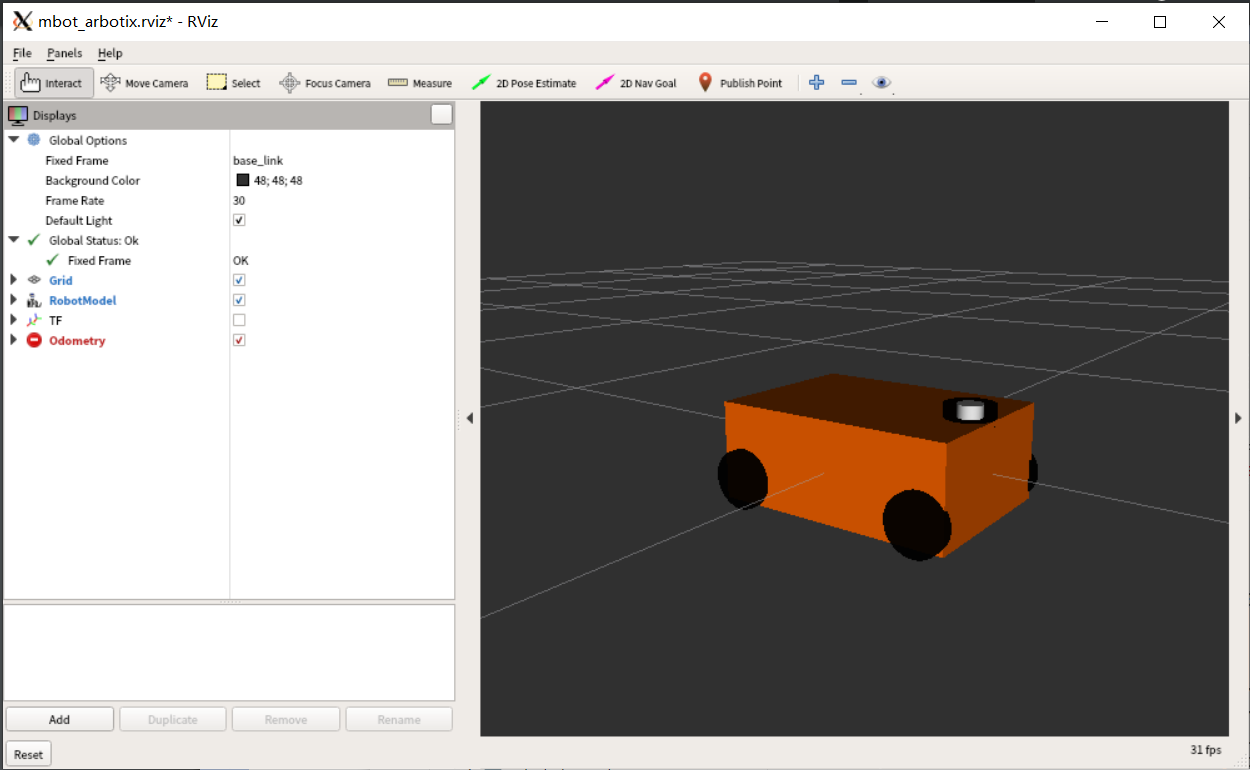
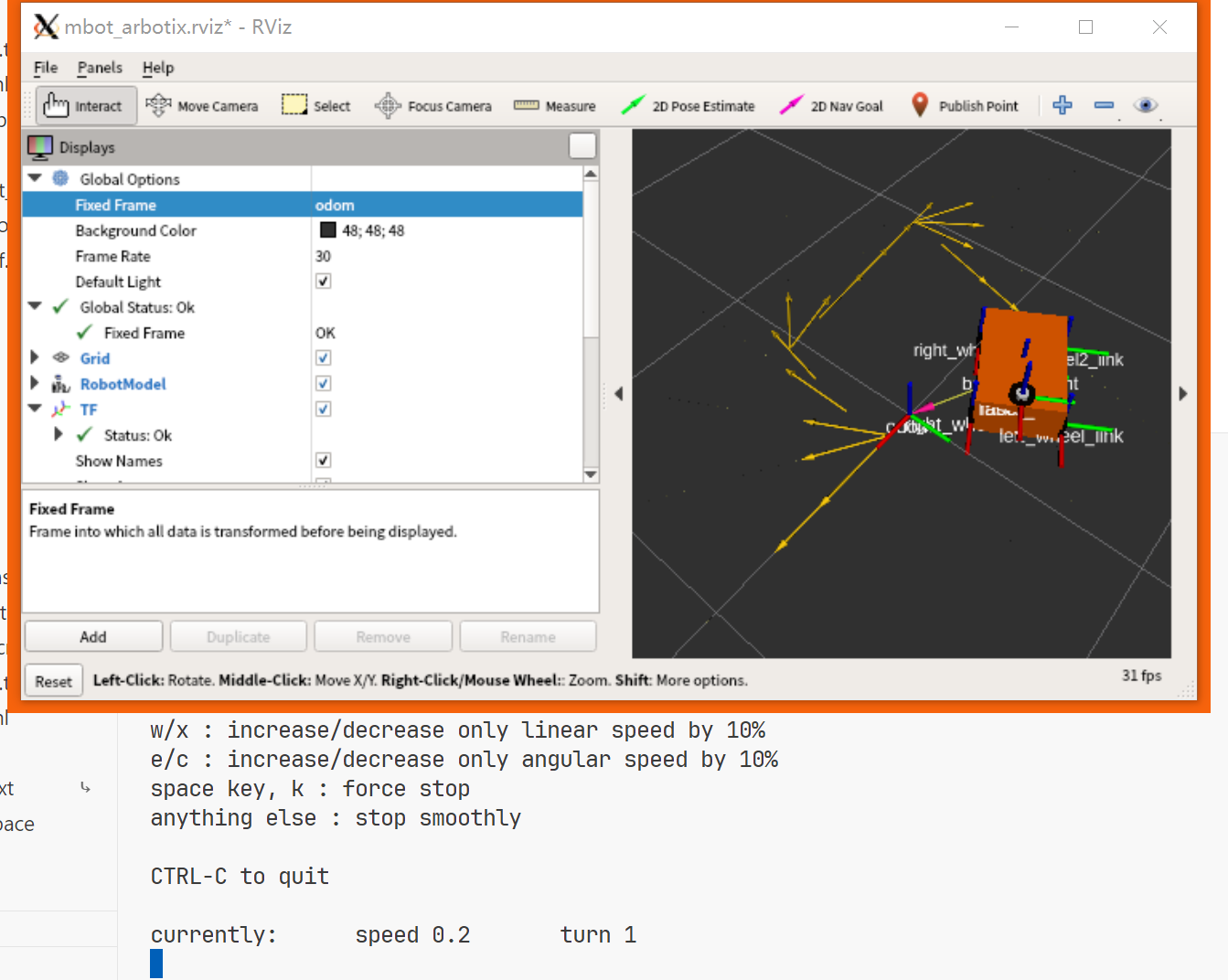
ArbotiX + rviz仿真
1
2
| roslaunch mbot_description arbotix_with_camera_xacro.launch
roslaunch mbot_teleop mbot_teleop.launch
|
使用了自己的四轮小车模型, 命令略有变化
但是没解决odom点不随车运动.
gazebo仿真
环境仿真
1
2
| roslaunch mbot_gazebo view_mbot_gazebo_play_ground.launch
roslaunch mbot_teleop mbot_teleop.launch
|
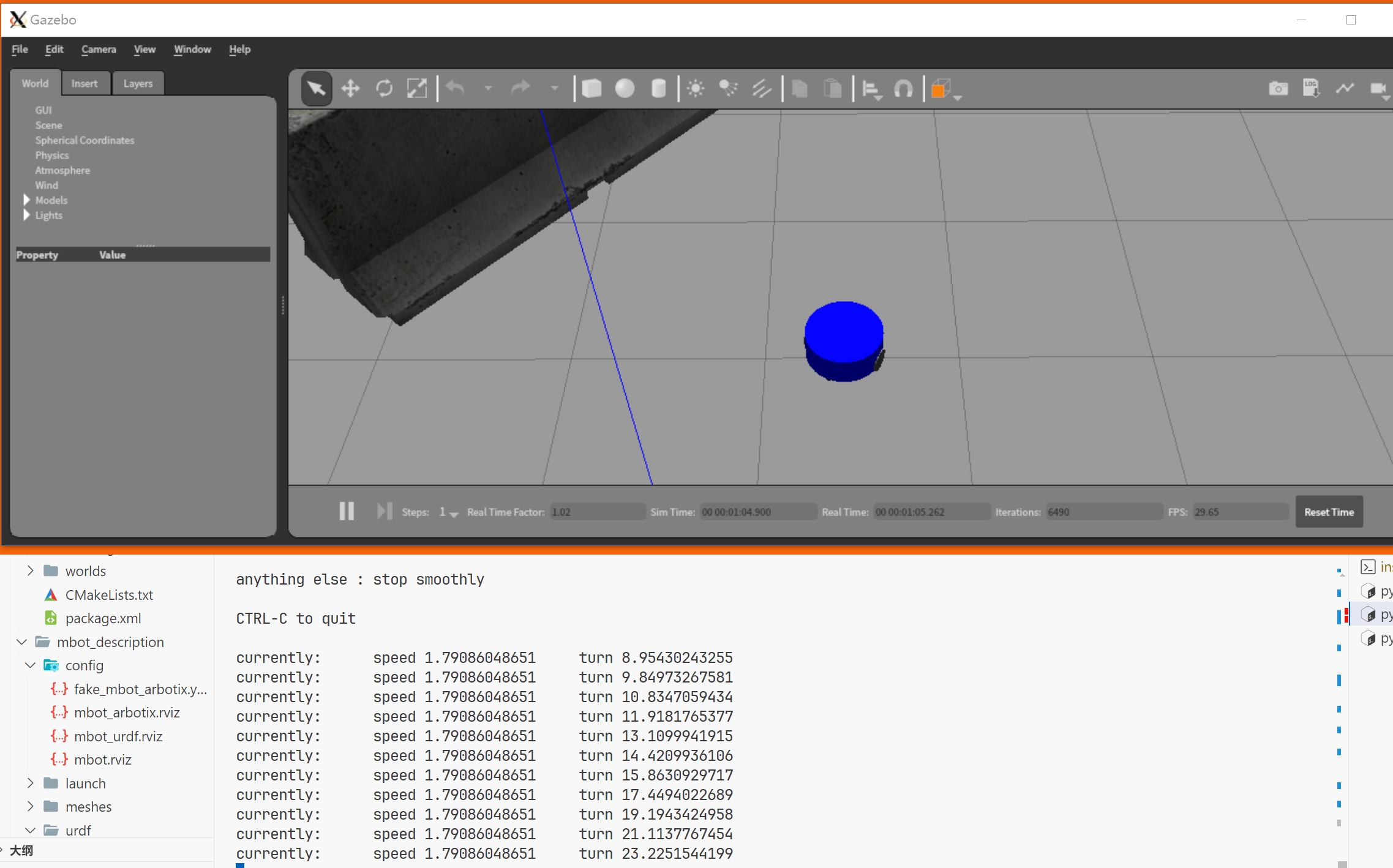
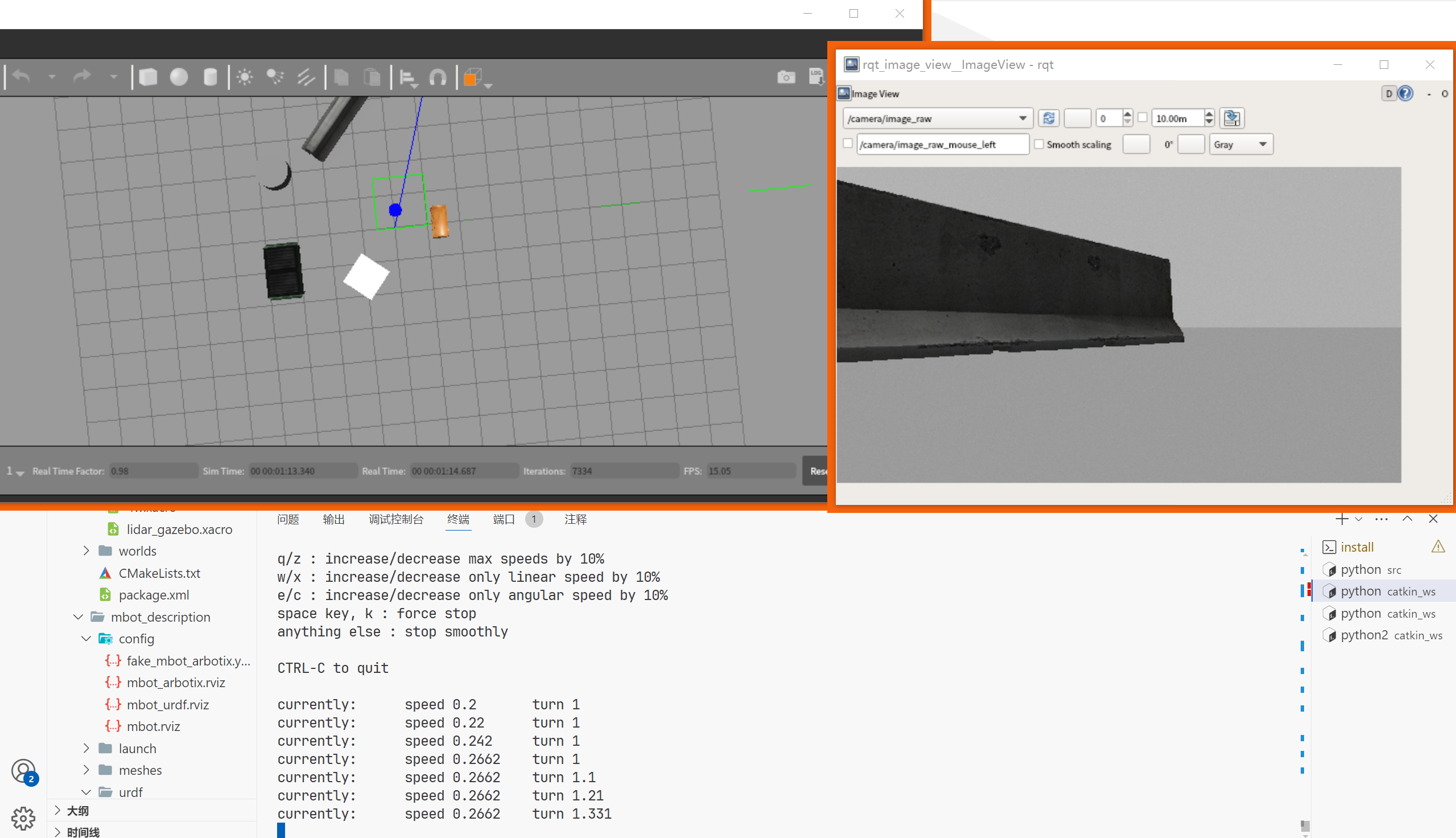
传感器仿真
摄像头
1
2
| roslaunch mbot_gazebo view_mbot_with_camera_gazebo.launch
rqt_image_view
|
雷达
1
| roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
|
机器人感知
机器视觉
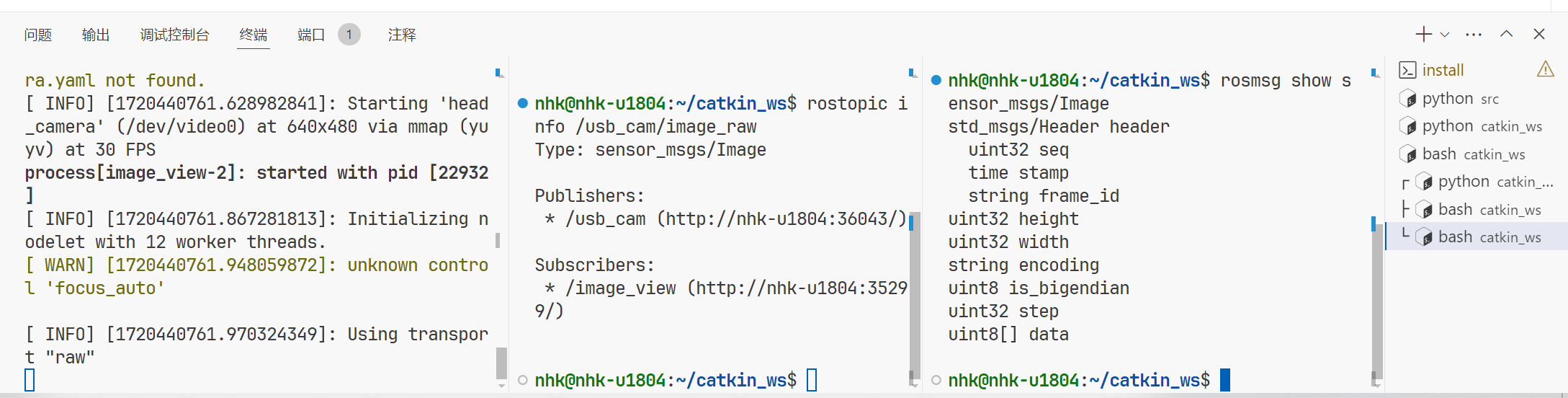
ROS的图像数据
1
2
3
| roslaunch usb_cam usb_cam-test.launch
rostopic info /usb_cam/image_raw
rosmsg show sensor_msgs/Image
|
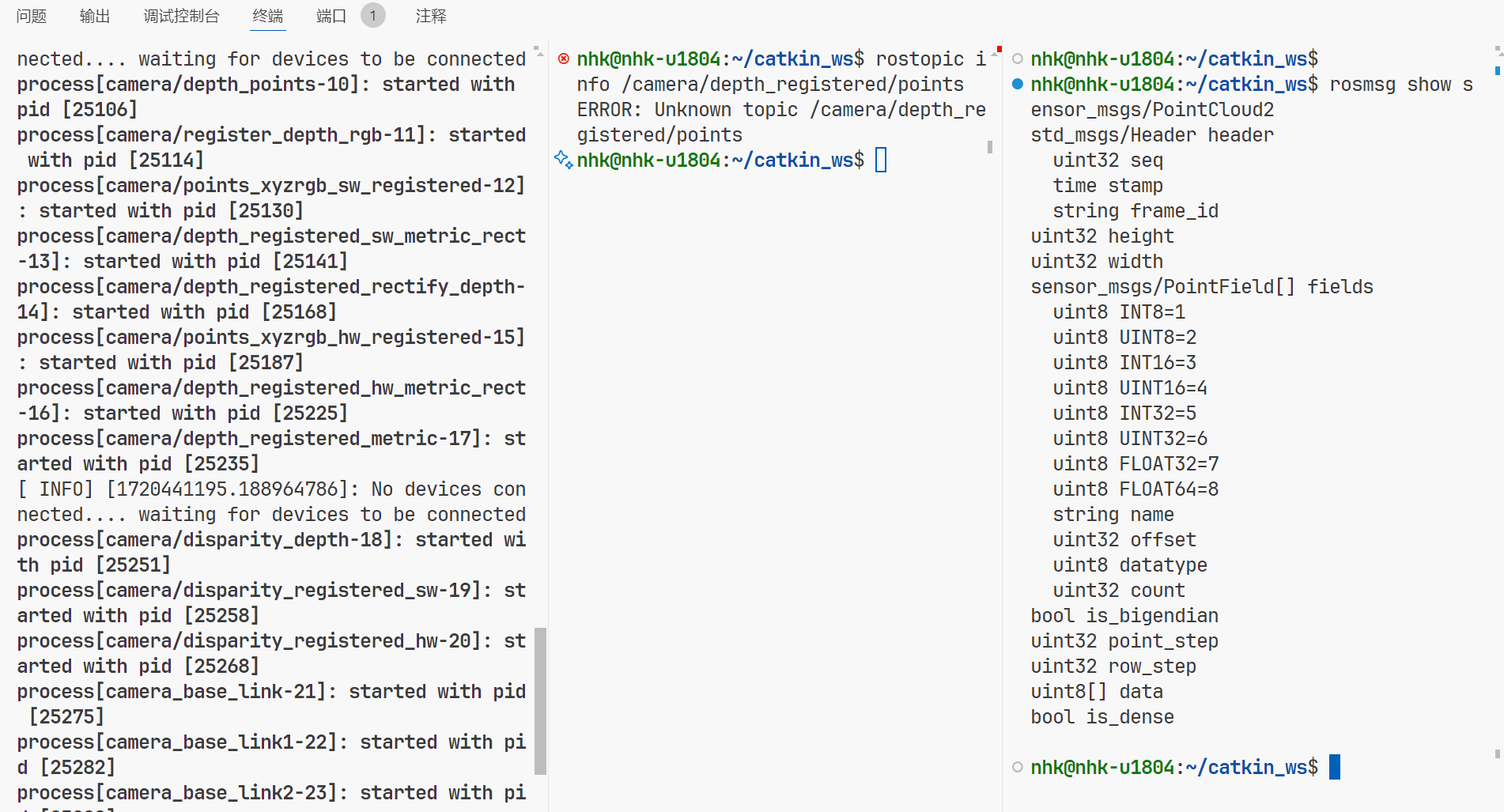
点云:
1
2
3
4
| roslaunch freenect_launch freenect.launch
rostopic info /camera/depth_registered/points
rosmsg show sensor_msgs/PointCloud2
|
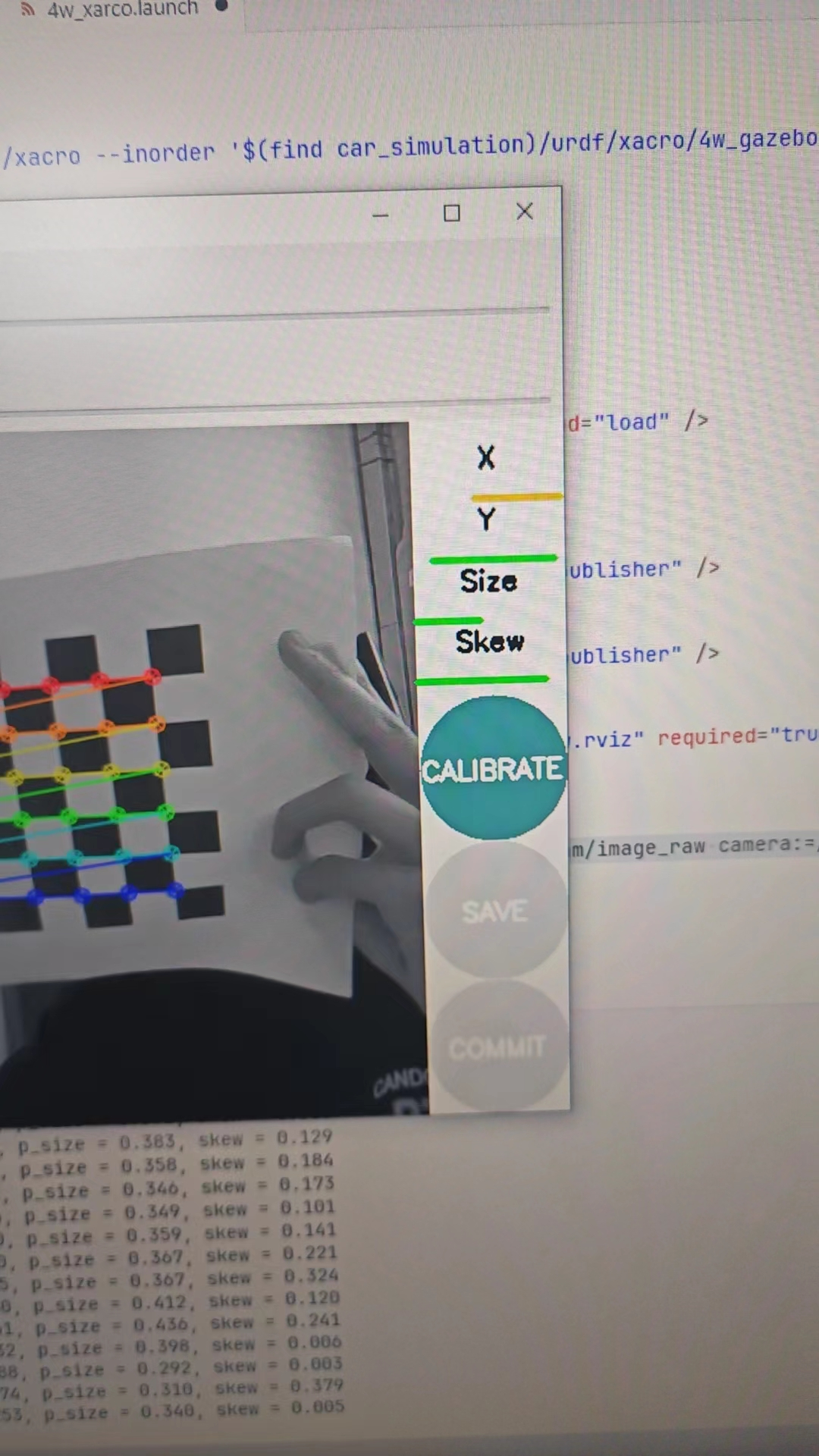
摄像头标定
1
2
| roslaunch robot_vision usb_cam.launch
rosrun camera_calibration cameracalibrator.py --Size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
|
kinet:
1
2
3
| roslaunch robot_vision freenect.launch
rosrun camera_calibration cameracalibrator.py image:=/camera/rgb/image_raw camera:=/camera/rgb --size 8x6 --square 0.024
rosrun camera_calibration cameracalibrator.py image:=/camera/ir/image_raw camera:=/camera/ir --size 8x6 --square 0.024
|
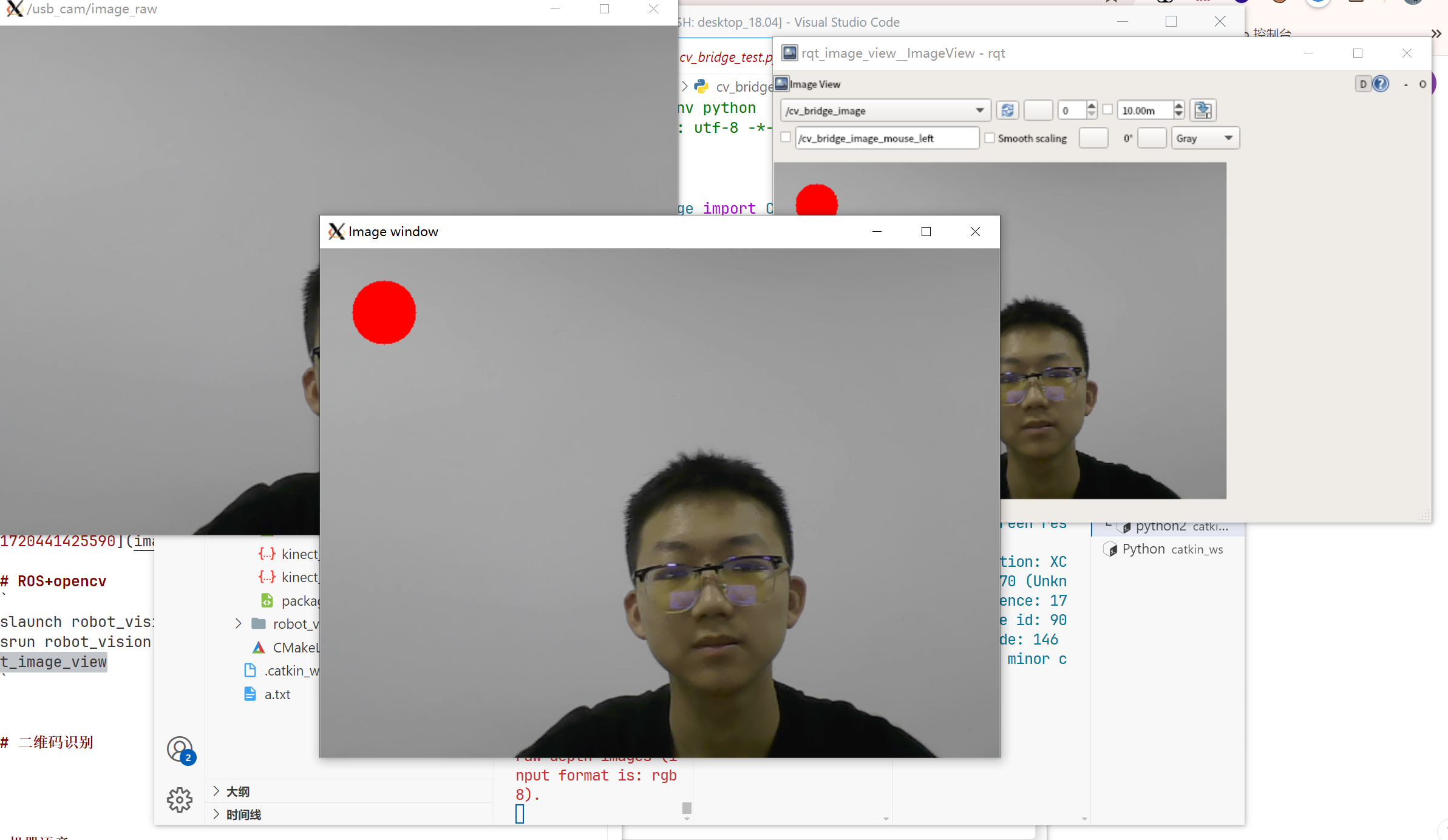
ROS+opencv
1
2
3
| roslaunch robot_vision usb_cam.launch
rosrun robot_vision cv_bridge_test.py
rqt_image_view
|
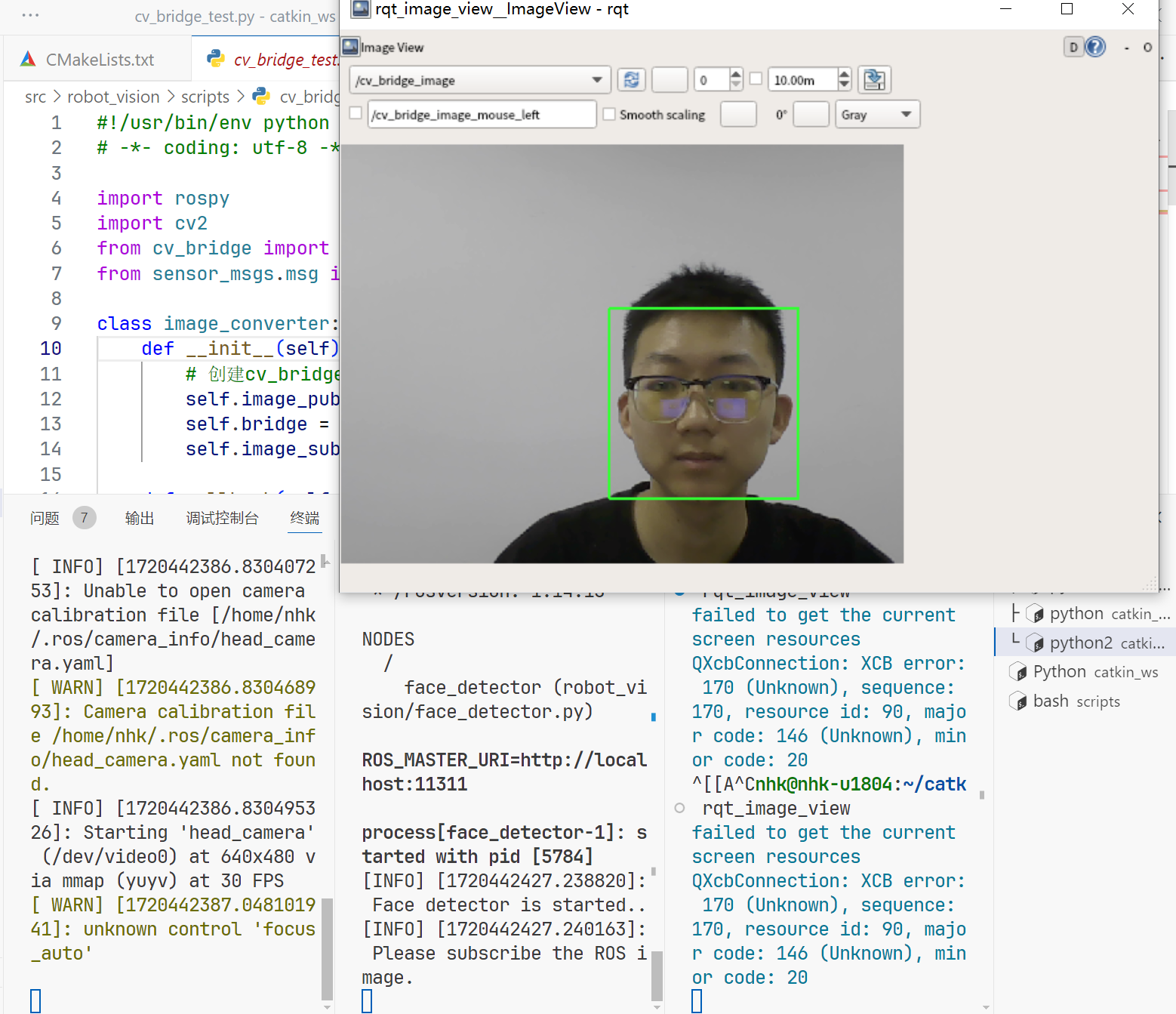
人像识别
1
2
3
| roslaunch robot_vision usb_cam.launch
roslaunch robot_vision face_detector.launch
rqt_image_view
|
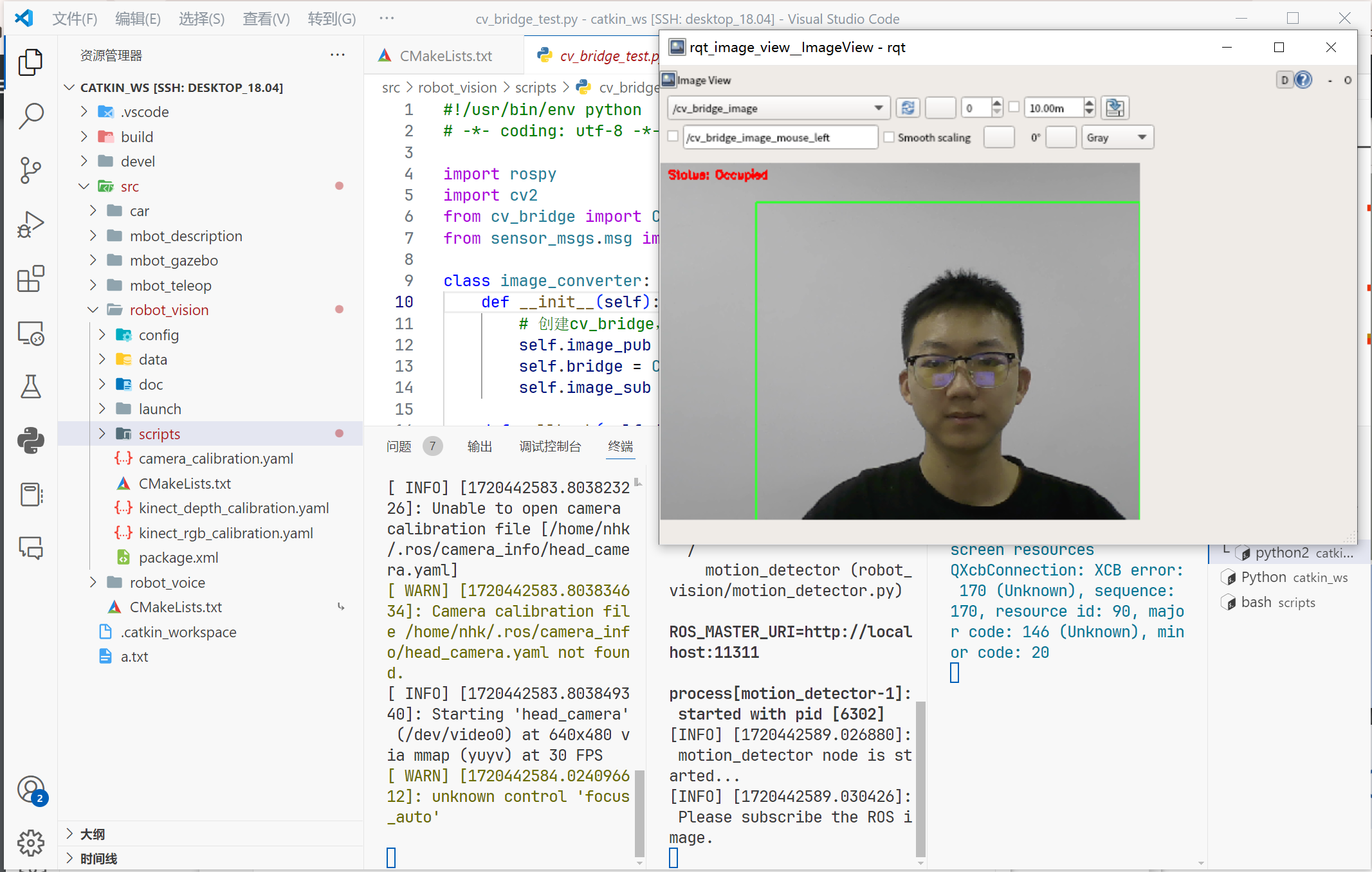
物体跟踪
1
2
3
| roslaunch robot_vision usb_cam.launch
roslaunch robot_vision motion_detector.launch
rqt_image_view
|
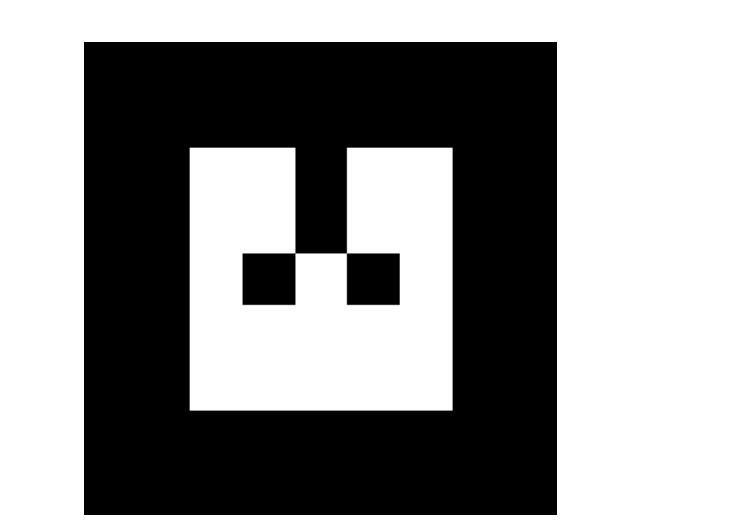
二维码识别
生成二维码
1
| rosrun ar_track_alvar createMarker 0
|
im
二维码识别(没有打印出来就没法识别)
1
2
3
4
| roslaunch robot_vision usb_cam with_calibration.launch
roslaunch robot_vision ar_track_camera.launch
#查看识别到的位姿
rostopic echo /ar_pose_marker
|
机器语音
语音听写
1
2
3
| roscore
rosrun robot_voice iat_publish
rostopic pub /voiceWakeup std_msgs/String "data: '你好我是小爱同学'"
|
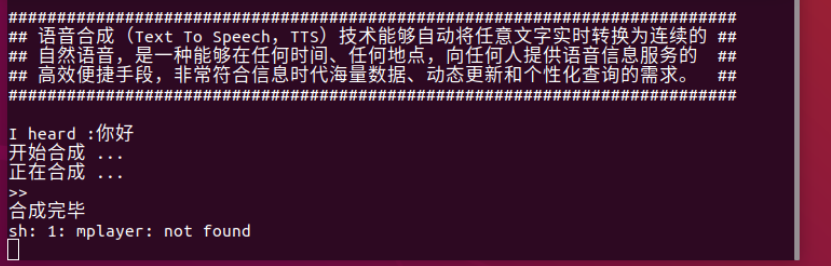
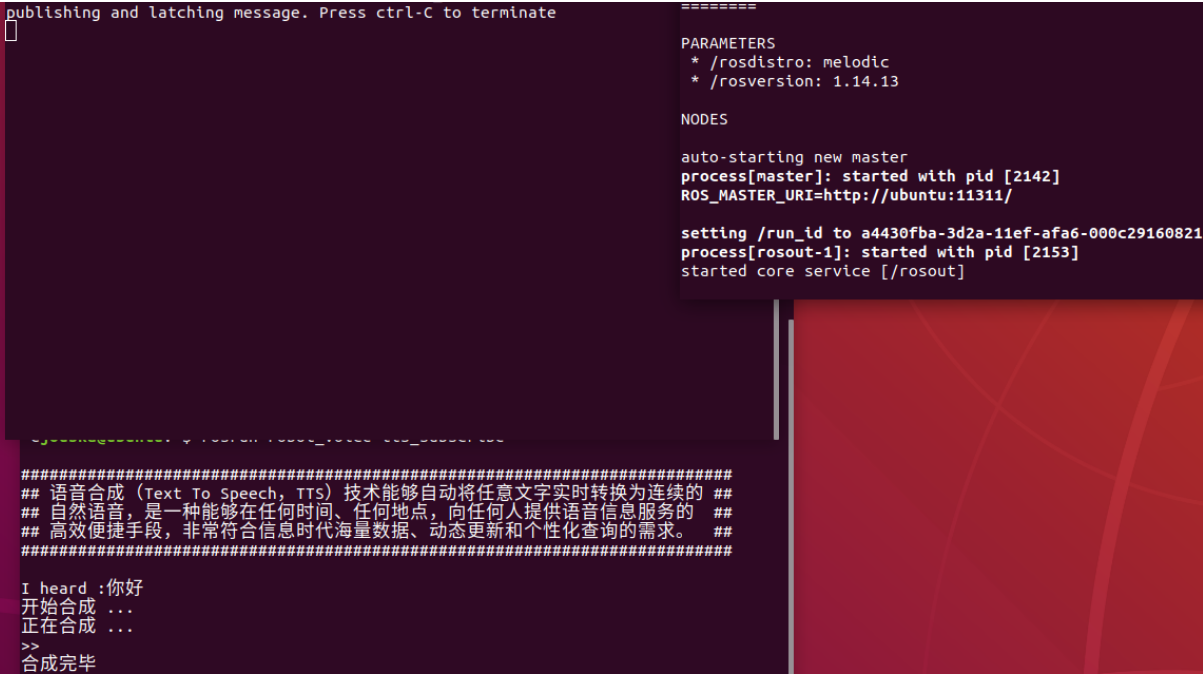
语音合成
1
2
3
| roscore
rosrun robot_voice tts_subscribe
rostopic pub /voiceWords std_msgs/String "data: 'hello'"
|

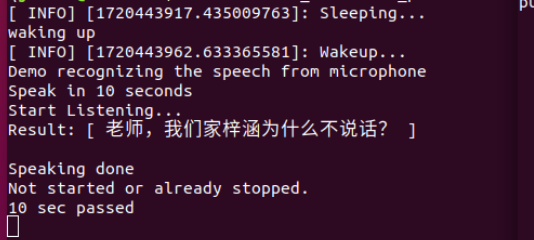
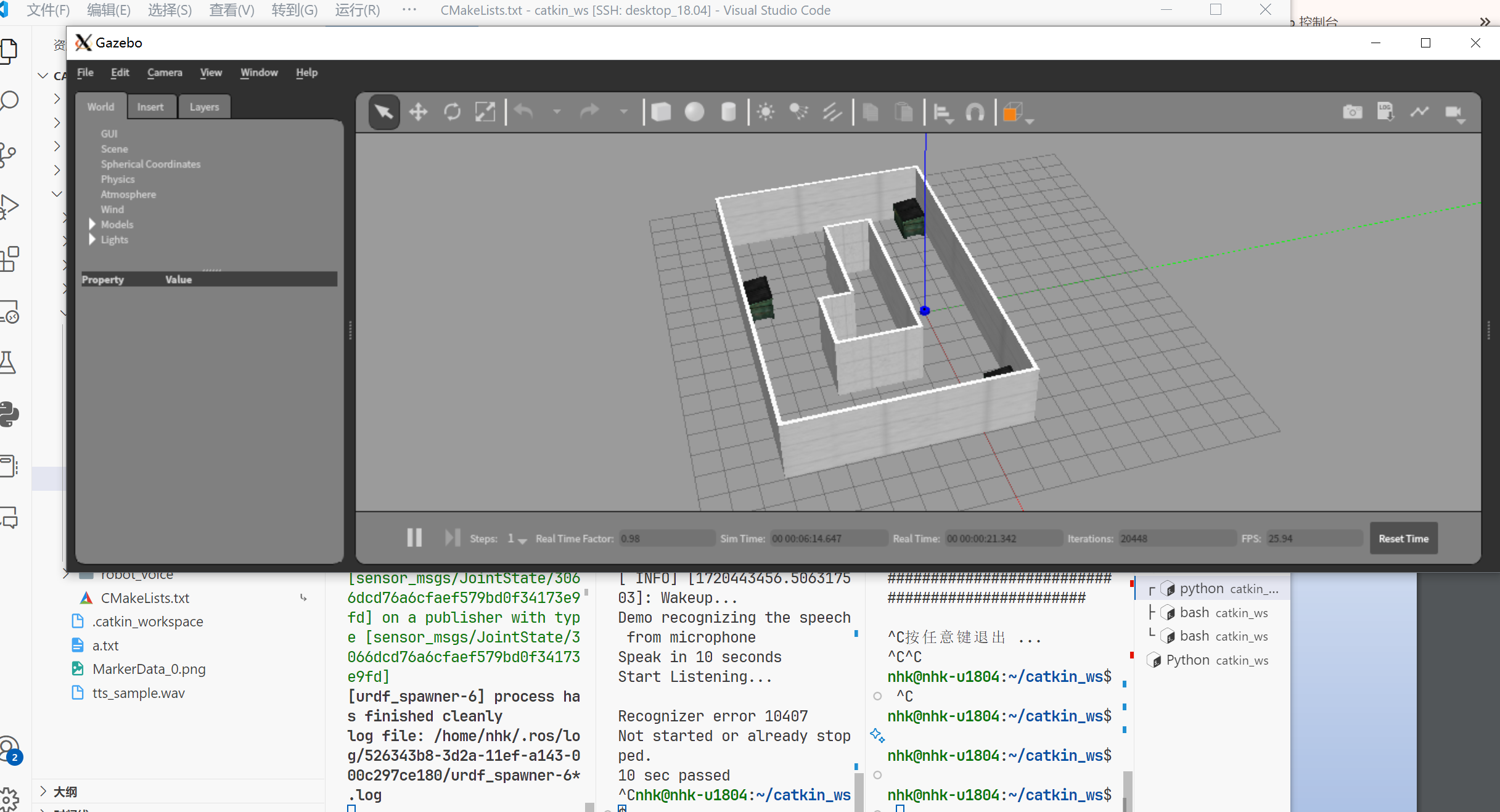
语音助手
1
2
3
4
| roscore
rosrun robot_voice iat_publish
rosrun robot_voice voice_assistant
rostopic pub /voiceWakeup std_msgs/String "data: 'any string'"
|
SLAM自主导航
机器人必备条件
创建仿真环境
1
| roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
|
SLAM功能包
gamping激光雷达测试
1
2
3
| roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation gmapping_demo.launch
roslaunch mbot_teleop mbot_teleop.launch
|
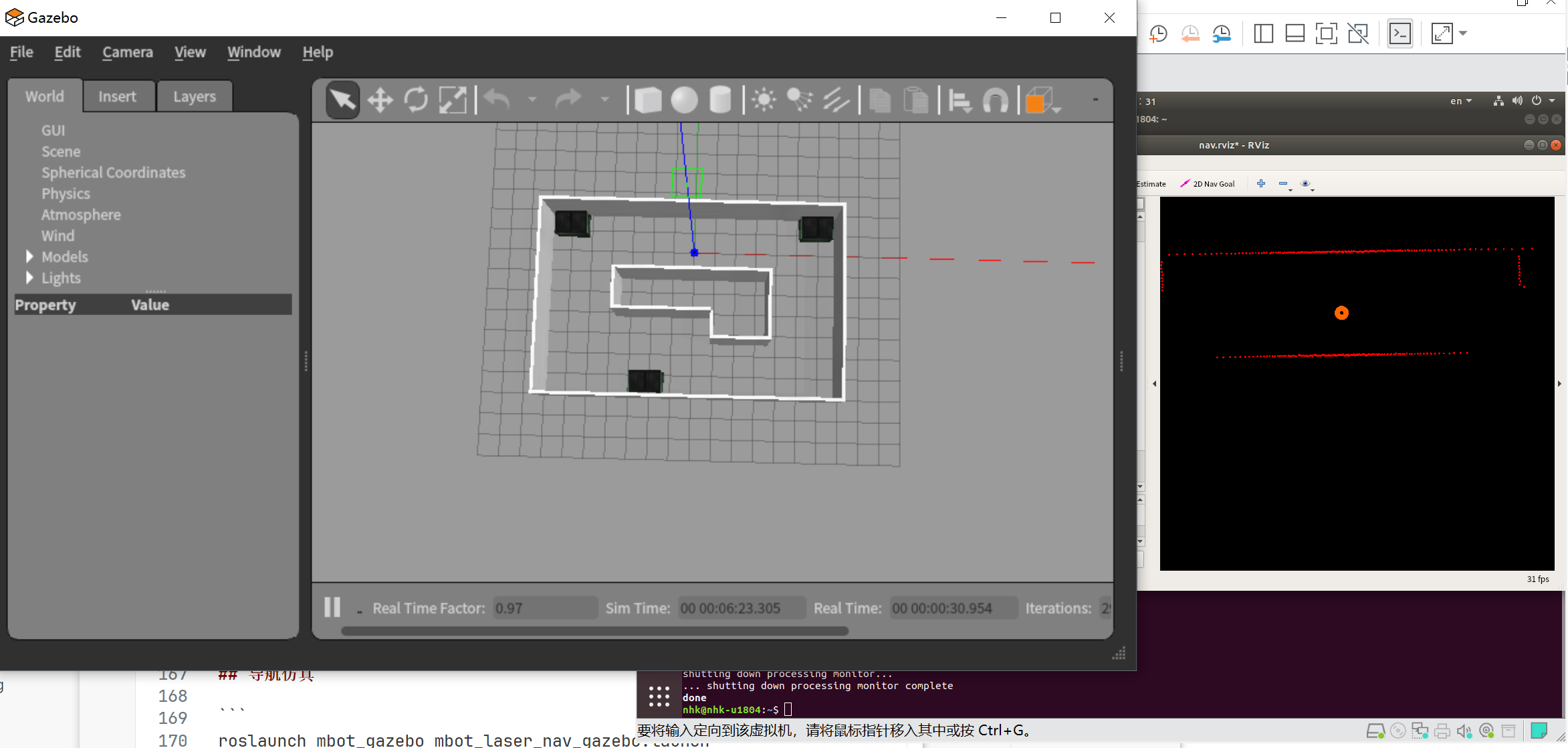
导航仿真
1
2
| roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation nav_cloister_demo.launch
|
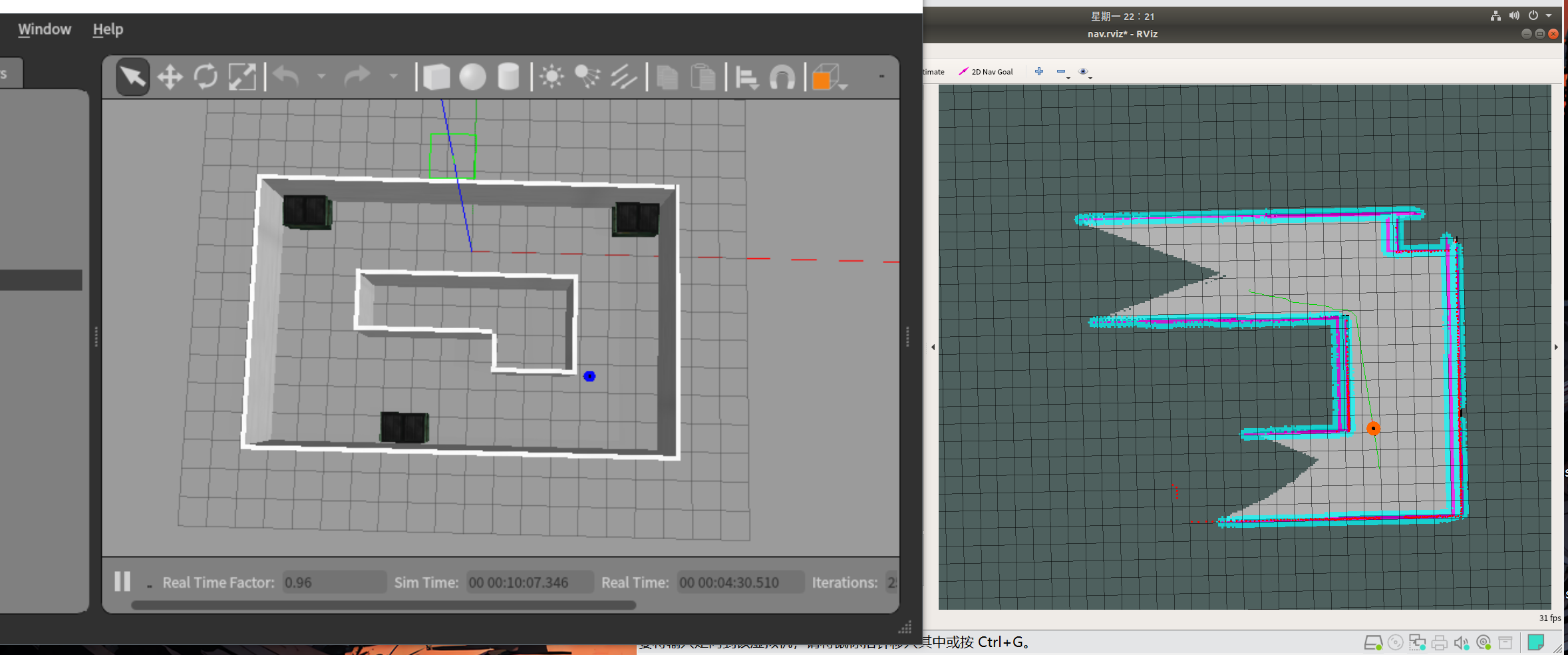
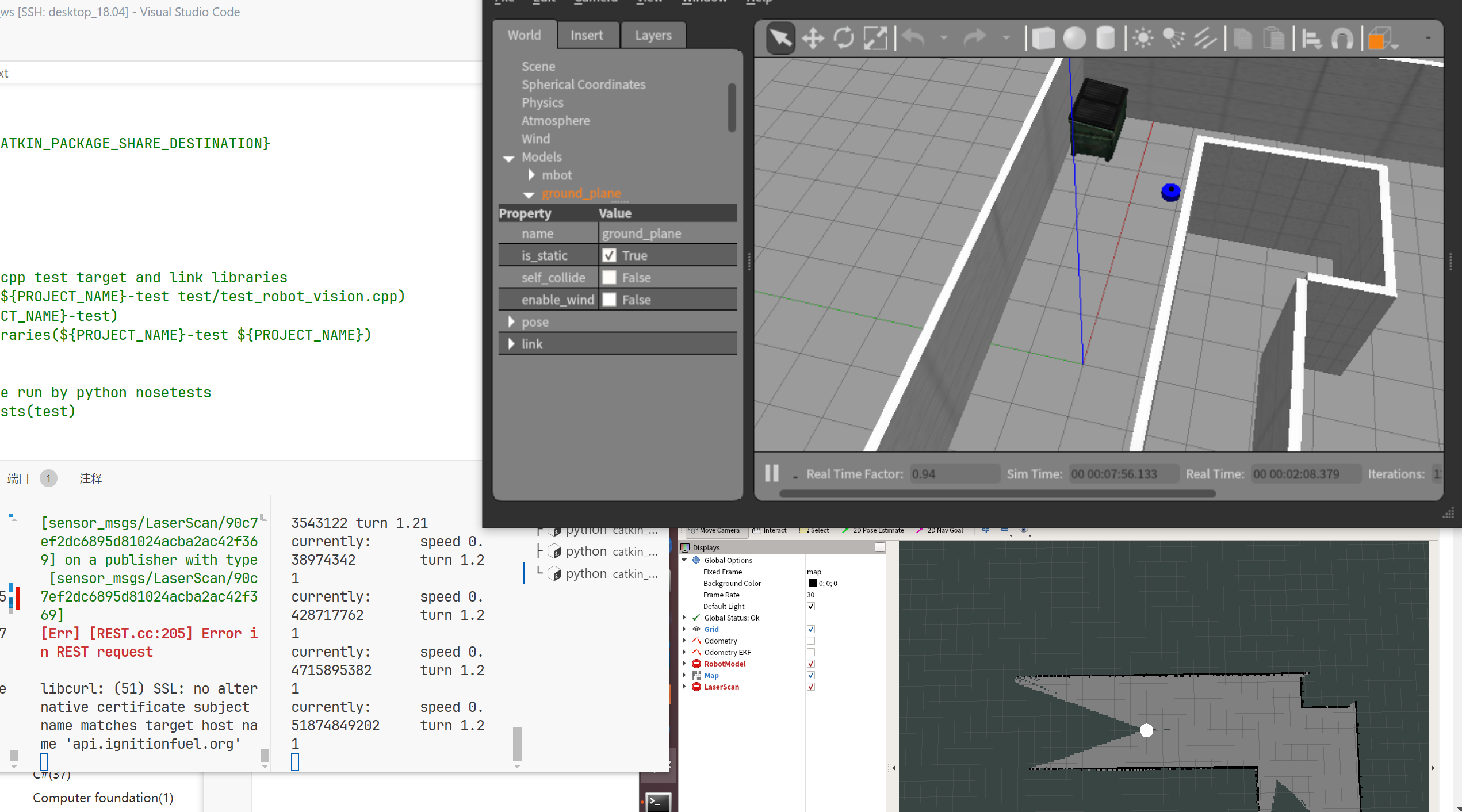
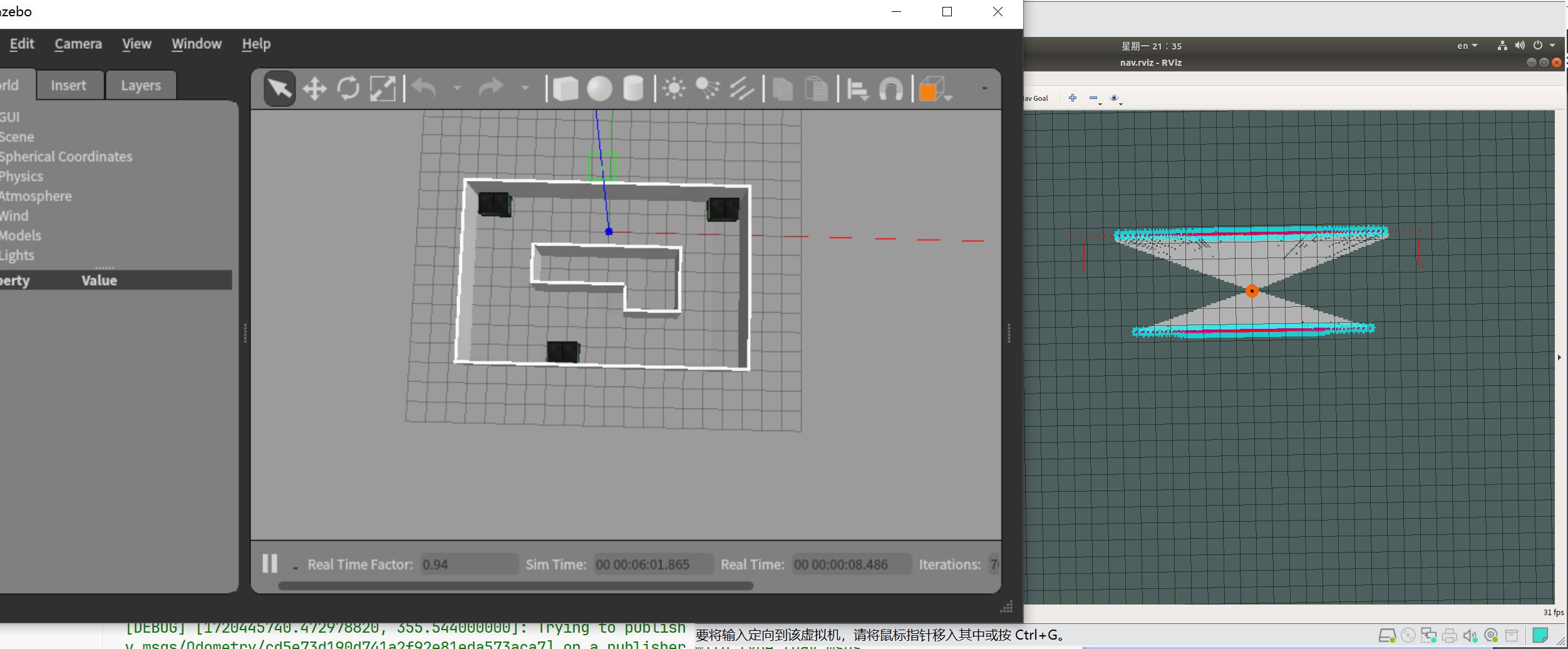
导航SLAM仿真
1
2
| roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation exploring_slam_demo.launch
|
自主探索
1
2
3
4
| roscore
roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
roslaunch mbot_navigation exploring_slam_demo.launch
rosrun mbot_navigation exploring_slam.py
|
自己的四轮小车移动有问题,使用了默认的